
The Djedi Project: Part 3
Introduction
The final part of this case study explores the construction of the chamber we needed to access and what the future holds.
General construction of the Chamber
The floors of the shafts are made of flat limestone blocks, the thicknesses of which are unknown. The walls and ceilings are formed by sections of inverted u-blocks that resemble upside down gutters. Although it is uncertain what the blocks above and below the shafts look like, the shafts run at a sloping angle through the horizontal layers of the pyramid, so it is believed that the u-blocks and basal blocks rest under and on blocks that are wedge-shaped.
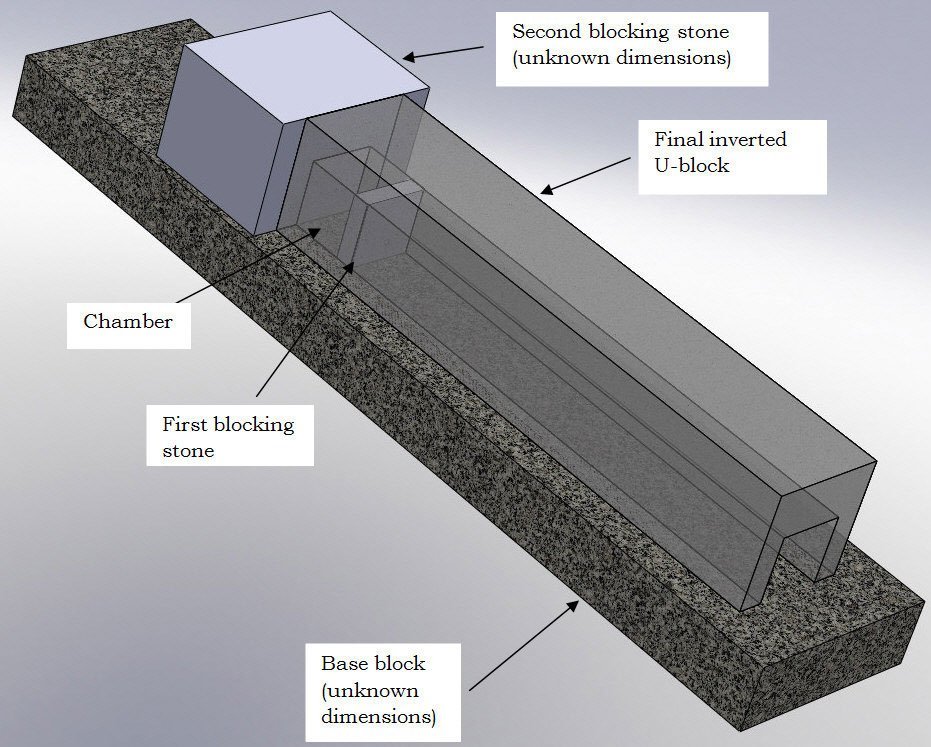
The first blocking slab in QCS (i.e., “Gantenbrink’s Door”) is located 63.6 meters from the shaft’s entrance in the Queen’s Chamber, plus or minus .4 meters. Its position was determined by a combination of Djedi’s odometers—sensors that estimate the distance the crawler moves over time—and the length of the crawler’s umbilical cable. Djedi confirmed Pyramid Rover’s measurement of the thickness of the first blocking slab as about 60 mm.

As discovered by Upuaut-2, and now confirmed by both Pyramid Rover and Djedi, the final section of u-block leading up to the blocking slab is made of a higher quality limestone than the rest of the shaft blocks, most likely the fine white Tura limestone originally used to provide the external surface of the pyramid with a smooth face. The blocking slab also appears to be made of the Tura limestone, and both the final u-block and the blocking slab have finished surfaces, unlike the rest of the shaft. The basal (floor) stone of the final section of the shaft is not made of the Tura limestone and has not been polished.

Although we learned from Pyramid Rover’s look behind the blocking slab that there was a small chamber behind the “door”, it was not known whether the walls and ceiling of the chamber were a continuation of the same u-block as the shaft leading up to it, or the beginning of a new section. Thanks to Djedi’s ability to look upward and back toward the door, this question was answered. In the shaft ceiling leading up to the door there are two crisscrossing cracks or veins which continue on the other side of the door, which confirms that the u-block continues on the other side of the slab.
The width of the shaft in front of the blocking slab was measured by the side bracing actuators in Djedi’s front carriage. After correcting for the padding on the tips of the actuators, the shaft was determined to be 230 mm wide, plus or minus 10 mm. Since the chamber is formed by the same u-block as the final section of shaft, it stands to reason that the chamber has the same width as the shaft. This was confirmed when Djedi was able to look at the back of the blocking stone and observe that the gaps between the edges of the slab and the chamber walls were the same on both sides, front and back.
There is a small triangular chip in the lower right hand side of the blocking slab that allows us to see a narrow 2-3 mm lip, or ledge, against which the blocking stone rests. The blocking slab is about 3 mm wider than the u-block, which has been cut slightly wider at this point to accommodate the “door”, thus forming the ledge. The tool marks where this widening of the u-block took place are still visible on the right hand chamber wall behind the blocking slab. Although less visible, the team believes there is a corresponding ledge on the left hand side, but none at the top or bottom. There is no sign of mortar holding the slab in place, it simply rests on these narrow ledges jutting out from the side.

The back wall of the chamber is formed by the second blocking stone. Unlike the u-block and the first blocking stone, the second blocking stone has a rough unfinished surface and appears to be made of the lower-quality local yellow limestone. The height of the chamber was determined by scaling the height of the second blocking stone. After adjusting for perspective, the Djedi team estimated the height of the second blocking stone to be about 230 mm—more or less equal to the width of the chamber. Thus, both the width and height of the chamber is about 23 cm.

To judge the length, or depth, of the chamber, the team put marks on the tube probe on which the snake camera is mounted. By comparing the snake camera’s field of view with its depth of field, they were able to determine when its tip was about 50 mm from the second blocking stone. Using the chassis-mounted camera, the team could see from the tube probe that the tip of the snake cam was 200 mm from the front of the blocking slab, meaning that the back wall of the chamber is about 250 mm from the front surface of the “door”. Given that that blocking slab is about 60 mm thick, the chamber was determined to be about 19 cm long (+/- 15 mm).
So by a variety of measurements, the Djedi team was able to determine that the interior of the chamber is about 190 mm by 230 mm by 230 mm (LWH).
The First Blocking Slab and the Metal Pins

Among the most interesting features of the Queen’s Chamber shafts are the copper pins affixed to the blocking slabs of both QCN and QCS. Since we are specifically discussing the aspects of the Djedi Project which have been published so far, we will limit our observations to the pins in QCS. The pins are judged to be copper, or mostly copper, due to their greenish coloration. Before the installation of the ventilation system during Project Upuaut, the atmosphere inside the Great Pyramid was extremely hot and humid, conditions that are very corrosive to copper, causing it to turn green.
Both pins protrude through the front (outer) surface of the blocking stone and have been hammered downward into a 90 degree position against the blocking slab. The bending of the pins appears to be deliberate, as they have been flattened where they were hammered. The original ends of both pins have been broken off at points which coincide with mortar patches. The left hand pin was broken off prior to the Upuaut Project, and the right hand pin was broken off by Pyramid Rover. Both of the broken off ends, estimated to be about 12 mm long, were observed by Djedi and will be collected by the crawler in a future mission.

The pins are surrounded by a black material where they pass through the blocking stone. The material seems to anchor them in place within the holes, and is itself apparently held in by mortar. It is unclear whether this is a different substance than the pins, constitutes a separate part through which the pins were inserted, or is a wider section of the pins themselves. It will take additional analysis to answer these questions.

Djedi allowed us to observe the back of the blocking slab for the first time. Like the front, the back of the first blocking stone has been polished to a smooth surface, and the pins protrude from this side as well. The back of the left hand pin appears nearly pristine, seems to exit the block and is then bent downward into a neat loop, with the bottom end of the pin flush to the block, and no mortar visible. The back of the right hand pin appears more fragile and or corroded, seems to be held in place with mortar at both the top and bottom of the loop, with the bottom inserted back into the mortar.

There is no explanation as of yet for the more corroded appearance of the right hand loop, and what practical function they may have served, if any, remains a mystery. As noted by the official report:
The loops are very small and would only permit an approximately 3 mm diameter object to pass through them. They do not appear to be very well positioned for functional purposes, as they are high up on the block. (Hawass, Whitehead, et at, p. 210)
Shaun Whitehead continues:
We also realize that there are lots of theories about what the shafts are for, ranging from practical explanations such as ventilation, to the more esoteric, such as part of a giant electricity generating power plant or a hidden hall of records. However, it’s not our part to speculate, we just want to gather as much information, and the best quality information as possible…We now know that these pins end in small, beautifully made loops, indicating that they were more likely ornamental rather than electrical connections or structural features. (Correspondence with the writer)

Djedi also showed that on the floor immediately behind the blocking slab there was a concentration of debris on the right hand side (as viewed from behind). The debris appears to be a combination of material from the construction of the shaft and dust produced by Pyramid Rover drilling through the door. The location and concentration of floor debris in the chamber is helping the Djedi team precisely determine the orientation and roll of the shaft, and additional details of these findings will be published in the future.
The Chamber Floor, Walls & Ceiling
The Chamber Floor and Its Markings
Just as the same u-block forms the walls and ceiling for both the chamber and the final (known) section of the southern shaft, the same basal block constitutes the floor in both the chamber and the section of QCS leading up to the blocking slab. In addition to the floor debris along the bottom of the blocking slab (mentioned above), there is a dark chip on the floor that appears to correspond to a cavity located on the left hand wall, which will be detailed further below.

One of the most exciting discoveries by the Djedi Project so far has been the markings found on the floor of the chamber. One of the marks is a straight red line that runs parallel to the right hand wall, extending from just behind the first blocking stone all the way to the base of the second blocking stone. The line has the same appearance as other red ochre mason’s lines that appear elsewhere in the shafts. There is an additional black mark on the floor where the red line meets the second blocking stone. These lines usually mark where blocks were to be cut, and why this particular line was not used is one of the unanswered questions about the chamber.
The source of no small amount of speculation is a series of three red glyphs drawn at about 45 degrees to the red line, between the line and the wall. Two other less distinct red marks occur on this side of the line, closer to the back of the chamber. The three glyphs appear to be mason’s marks written in hieratic, a form of shorthand hieroglyphs. The official report suggests that central and left hand glyphs appear similar to the hieratic figures for 20 and 1, respectively, or 21 when read together (p. 211). The right hand glyph is inconclusive and is left uninterpreted by the official report.

One theory that has been put forth by Luca Miatello, an independent researcher in Egyptian mathematics, who is unassociated with the Djedi project, is that the right hand figure is the hieratic figure for 100. Referring to the three glyphs, in an interview with Discovery News Miatello stated:
The markings are hieratic numerical signs. They read from right to left, meaning 100, 20, 1. The builders simply recorded the total length of the shaft: 121 cubits. (Discovery News: Pyramid hieroglyphs likely engineering numbers, by Rosella Lorenzi, June 7, 2011)
While this is one possible interpretation of the glyphs, it is far from conclusive. The central and left hand glyphs do appear to be hieratic for 20 and 1, but in this writer’s lay opinion, the right hand glyph is not clear enough for interpretation, and in any case, looks more similar to the hieratic figure for 200 than 100. The hieratic glyph for 200 has a mark in the crook of its “elbow”, the glyph for 100 does not. The right hand glyph on the floor appears to me to have a mark in its crook. Miatello’s theory is a good one, and may ultimately be vindicated with further analysis, but at this point I do not feel the evidence allows for a conclusive interpretation.

Regarding the glyphs, Dr. Richardson has gone on record already, stating “We believe that if these hieroglyphs could be deciphered they could help Egyptologists work out why these mysterious shafts were built” (Response to media enquiries, p. 1). Shaun Whitehead would only add “Experts have had the opportunity to comment on the marks, and it is still generally agreed that they are hieratic characters. It would be very exciting to find similar characters behind the first blocking stone in QCN” (Interview with Shaun Whitehead).
The walls and ceiling of the chamber are formed by the final section of u-block, partitioned off from the shaft by the first blocking stone, and terminated by the second blocking stone. When talking about the walls and ceiling of the chamber, therefore, it must be kept in mind that they are not separate pieces, but are all parts of the same block. For purposes of orientation, it is assumed that we are looking across (actually, upward) to the second blocking stone. Thus, the right wall is the one on your right hand side as you face the second blocking stone, with your back to the “door”.
As stated above, there is a cavity on the left hand wall of the chamber that appears to correspond to a chip located on the floor nearby. The Djedi team proposes that the damage was caused by a spall “where an underlying pressure point has been created, probably from a chemical reaction” (Hawass, Whitehead, et. al, p. 212). There is also a patch of flaking limestone close to the second blocking stone. There are two red mason’s marks on the very edge of the left hand wall where it abuts the second blocking stone.

The right hand wall is interesting only in that it is slightly rougher near the first blocking stone. Whereas the rest of the inside of the final u-block is finely polished and shows no obvious tool marks, there is a section on the right hand side behind the “door” where there are some diagonal tool marks visible. The section is still smooth, but for some reason the workers were unable to sand out the tool marks in this area. There are no corresponding tool marks on the left hand wall.

The Djedi team proposes that this is the result of the block being cut to form the ledge that the “door” rests on, visible on the outside of the blocking stone via the triangular chip in the lower right corner. Because of the way the right hand wall angles slightly inward to form the ledge, it was thus difficult to reach this spot for polishing. This shaved area may also have been necessary to allow the blocking slab to be angled into place, as the slab is otherwise wider than the u-block, as indicated by the ledge it nestles against.
[Note: as will be mentioned when we discuss the second blocking stone below, Shaun Whitehead indicated in the Em Hotep interview that there are some red ochre marks on the back of the right wall, near the second blocking stone, which may correspond to those on the left wall.]
The ceiling is unremarkable, other than the cracks which emerge from the other side of the blocking stone, confirming that it is the same section of u-block that comprises the final part of the shaft. Regarding these cracks, Shaun Whitehead says “It is most likely that they occurred after the U-block was finished and positioned, as the rest of the construction is so careful in this region.” There is another large crack that angles inward from the back left corner, where the ceiling meets the second blocking stone.
The Second Blocking Stone

The second blocking stone, which forms the back wall of the chamber, has a rough unfinished surface and appears to be made of the same lower quality yellow limestone that is used in most of the shaft. Other than the same tool marks seen on other similarly rough blocks, and a green “trickle line”, the block has no distinguishing marks.
The “trickle line” is of indeterminate nature. It emerges from the top of the stone, just left of the center, and runs slightly diagonally to the left, stopping 3-4 cm above the floor. It is greenish in tint, and the official report suggests that it could be either accidental, such as copper oxide leaching from a nearby copper object, or purposely painted onto the block using the “Egyptian blue” pigment created by calcium copper silicate (p. 213). Both causes would result in the sort of green seen in the trickle line.

However, the official report also states that in order to produce a streak of copper oxide as prominent as the “trickle line” there would have to be a “significant presence of water” (p. 213), any source of which would be pure speculation unsupported by the existing data. Regarding the possibility that the line could be the result of minerals within the limestone itself, Shaun observes “So far I have not seen any similar marks anywhere else in the shafts, decreasing the possibility that it was a mark that naturally occurred at the quarry” (Interview with Shaun Whitehead).
Djedi also noted that there is vertical cracking one third of the way from the right hand side which is odd (but not unique) in that it does not seem to emanate from one edge or the other:
It stops and starts suddenly and ‘feathers’ midway. These features are normally more associated with drying shrinkage rather than structural loading, although similar cracking has been observed elsewhere in the shafts. (Hawass, Whitehead, et al, p. 213)
The big question regarding the second blocking stone is whether it is the end of the shaft, and if not, what is on the other side? Does another section of shaft resume on the other side? Could it open into another chamber, possibly another burial chamber, or a section of internal ramp? Or is it the terminus of the shaft, plain and simple? A couple of factors within the scope of the Djedi Project and the robot’s capabilities could help answer these questions.
First, how does the final blocking stone fit against the end of the shaft? Does the block lay flat against the end of the final section of u-block, like a lid, or is it plugged into the shaft like a cork? If the former, that would suggest that the u-block terminates against the second blocking stone. If the latter, then the u-block may continue past the second blocking stone, depending on whether the second block has a sort of T-shape, with the thinner section inserted into the shaft, or whether it is small enough to be fully inserted into the u-block like the first blocking stone, which means the shaft could potentially continue beyond it.

This first question could possibly be answered by further analysis of the edges of the back end of the u-block. As mentioned above, there are mason’s marks on the edges of the u-block, where it meets the second blocking stone. These marks could simply be lines the workers made when cutting out sections of u-block. But they could also have marked a section where the u-block was shaped to form a ledge, like the one against which the first blocking stone rests. As the official report notes, this could mean that the second blocking stone is inserted into the shaft like a cork, rather than lying across it like a lid (p. 214).
Shaun Whitehead expanded on this question in the Em Hotep interview:
At a first glance, the second blocking stone just seems to be a large, relatively rough-hewn block sitting on the end of the U-block. However, the intriguing thing is that there appear to be red ochre mason’s marks on both walls at the far end where they meet the second blocking stone. This may suggest that this U-block has been cut back at this point, to form ledges on both sides. It’s possible to follow this reasoning to several logical conclusions, all currently speculation.
The other question which lies within the scope of Djedi’s capabilities is: how thick is the second blocking stone? If it is, like the first “door”, more of a slab than a block, and if it is either inserted into the shaft or rests on a ledge, then this could be a pretty good indicator that there is something on the other side than the core material of the pyramid. Again, Shaun explained the difficulties involved in taking this measurement in the Em Hotep interview:
The intention is to try to determine the thickness of the second blocking stone with the miniature “Sonic Surveyor” that I mentioned earlier. This uses a similar device to that used by Pyramid Rover, however it’s much, much more difficult to build. Pyramid Rover’s device was so large that it covered about half the area of the blocking stone. Ours has to fit through the existing hole in the first blocking stone, so can be no larger in diameter than a pen. This includes the actuator for “tapping” the stone, the sensor for listening to the response and the electronics to process the signal. We also have a much rougher stone to try to evaluate. It’s really tough to get it just right. The development was somewhat hindered by the sad death of Ron Grieve.
The Djedi team remains confident that these difficulties will be breached, and that when work in the Queen’s Chamber resumes, modifications currently being made to the robot crawler will allow them to get a good read of the thickness of the second blocking stone. Until then the questions remain—if the shafts ends with the chamber, and the first blocking stone was simply the dressed facing stone for the end of the shaft, why was it inserted 190 mm down into the shaft rather than flush against the end of the final u-block, and, if the chamber is not the end of the shaft, why is the second blocking stone made of the rougher, unfinished limestone, rather than the dressed Tura limestone?
These questions will only be answered, if ever, with further analysis of the shaft and the chamber.
Other Marks Inside QCS
When the Djedi team was able to analyze the video footage from the southern shaft they made another interesting discovery. On the lower right hand wall of the shaft, about 3.5 meters before the first blocking stone, there are some additional marks similar to the hieratic glyphs discovered inside the chamber. Like the other glyphs, these marks appear to be made in red ochre and black paint. According to the official report, the marks are about 3-4 cm tall, but “as the marks were found serendipitously, it was not possible to examine them closely” (p. 214).

The Future of the Djedi Project
Like all Egyptological fieldwork, the Djedi Project has been affected by the political environment in Egypt following the January 2011 revolution. However, there is plenty of reason to be optimistic. The team has resubmitted their formal application to resume work in the Great Pyramid, and Shaun reports that their application has been reviewed and they are awaiting approval by the various committees that have been established by the new government to help Egyptologists get back to work. The Djedi team hopes to finish their work in one final season and then publish all the results as soon as possible.

(Photo Tahrir Square, Friday 8 April 2011, by James X)
Meanwhile, there is still plenty to be done—and that is being done—to analyze the data gathered so far and to prepare for the resumption of fieldwork. Specialists are working to complete the 3D reconstruction based on the various types of data collected from QCS and the chamber, and to integrate this into the larger picture. As mentioned before, Dassault Systèmes has already worked with Jean-Pierre Houdin to create an incredibly accurate and detailed 3D virtual reconstruction of the Great Pyramid, and the mutually beneficial connections between Project Khufu and Djedi—having experts involved in both projects working together—are readily apparent.

Djedi is also being refitted in preparation for returning to QCS and for its voyage into the more difficult Queen’s Chamber northern shaft. QCN had to negotiate around other internal structures, such as the Grand Gallery, and presents a greater challenge for the agile little robot. As Shaun explained to Em Hotep:
We have completely redesigned and rebuilt the brace actuators (that grip the walls), improving the climbing algorithms and techniques of the robot, [we are] designing tools to help the robot cope with the complex bends in the Northern shaft, extending the reach and agility of the snake camera, fitting a high definition camera, perfecting the Sonic Surveyor, working on 3D video reconstruction, multispectral imaging of the shafts inside and outside the pyramid if possible…
Djedi’s remaining work may be summarized as follows:
- Determine the thickness of the second blocking stone in QCS, and if feasible, drill through it and see what lies beyond.
- Determine the thickness of the blocking stone in QCN, and if feasible drill through it and see if there is a chamber in QCN like the one in QCS.
- If there is another chamber in QCN, with a matching second blocking stone, analyze that block as well and hopefully drill through it and see what lies on the other side.
The next obvious question is: if there is another space behind the second blocking stone in QCS, and presumably, QCN, what then? Eventually the shafts have to end, either in a final chamber or passageway, against the core of the pyramid, or out the other side of the pyramid’s surface. And if there is something on the other side of the second blocking stone[s], Djedi will inevitably reach the end of its capabilities. It is obviously too large to fit into the drill holes, and while a snake camera can feasibly be extended to an indefinite length, tube drill cannot—once it reaches a certain length the weight of the tube becomes too heavy.
But necessity is the mother of invention, and Scoutek is no stranger to creating smaller and smaller robots. The Great Pyramid of Khufu may necessitate a leap into the next, next generation of robotic archaeology.
Works Cited
Zahi Hawass, Shaun Whitehead, TC Ng, Robert Richardson, Andrew Pickering, Stephen Rhodes, Ron Grieve, Adrian Hildred, Mehdi Tayoubi and Richard Breitner. “First report: video survey of the southern shaft of the Queen’s Chamber in the Great Pyramid.” Annales du Service des AntiquitÉs de l’Égypte . Tome 84, 2010. Pp. 203-16.
Copyright by Keith Payne, 2012. All rights reserved.
All photographs and images watermarked “Courtesy of the Djedi Team” are copyrighted by the Djedi Project Team, all rights reserved, and are used with the permission of the copyright holders. All photographs and images watermarked “Courtesy Dassault Systèmes/Djedi Team” are copyrighted by Dassault Systèmes and the Djedi Project Team, all rights reserved. The photo Tahrir Square, Friday 8 April 2011, by James X , is used in accordance with the Creative Commons 2.0 license.
All images watermarked “National Geographic” are copyrighted by National Geographic, all rights reserved. All other copyrighted images are watermarked by the copyright holders, all rights reserved by said entities. Copyright law allows limited use of copyrighted material under the fair use doctrine, to wit, “[A] reviewer may fairly cite largely from the original work, if his design be really and truly to use the passages for the purposes of fair and reasonable criticism.” The copyrighted material reproduced in this article is used for the sole purpose of discussing and documenting the history of these various projects and does not seek to compete with the originals, prejudice their sale, or diminish their profits, or supersede the objects, of the original work. The positions of the originals are, as much as possible, represented fairly and accurately with no speculation attributed, implicitly or explicitly, to the creators of the originals, nor is it suggested, implicitly or explicitly, that the creators of the originals have endorsed this article or its contents. Having said such, if you are the owner of the copyright to any of the material reproduced within this article it is not the intent of Em Hotep or any of its agents to violate your rights as the owner, and if you feel your rights have been violated and request that said material be modified or removed, it is the policy of Em Hotep, where it is reasonable to do so, to comply with said requests. All other images are in the public domain and are not subject to copyright law.






































